大疆7.5万元电影机Ronin 4D直接满血:支持徕卡、松下等L卡口镜头
DJI Ronin 4D是大疆首款电影摄影机,搭载全画幅禅思X9云台相机,集成了四轴增稳系统、LiDAR 激光跟焦系统、无线图传控制系统等,6K相机版售价46888元起,8K相机版售价74888元。禅思X9云台相机配备可更换卡口设计,不仅支持DJI自主研发的DL卡口,还支持官方推出的徕卡M卡

更新日期:2023-01-31
来源:纯净版系统
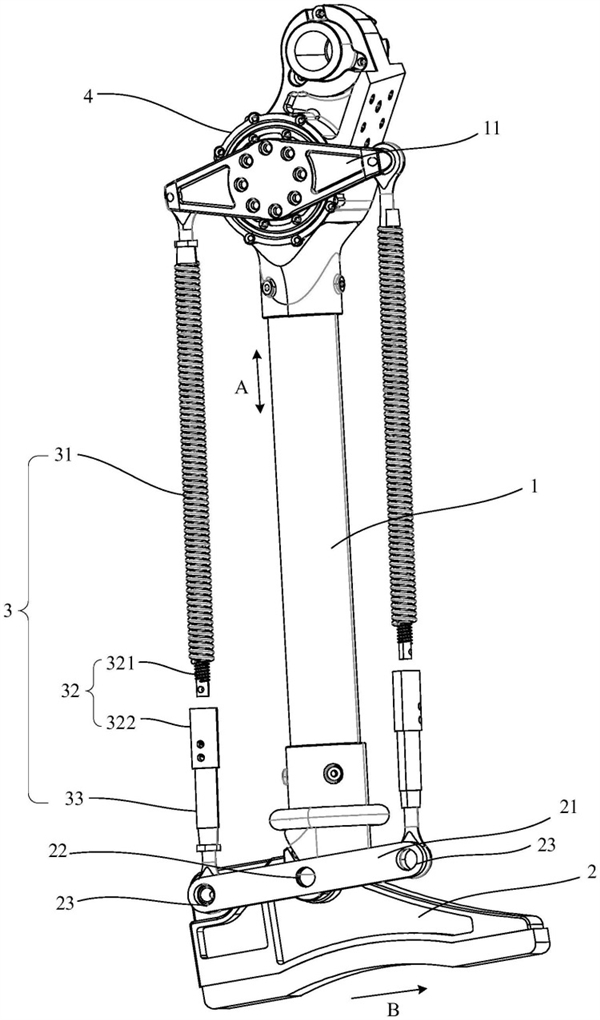
近日,北京小米移动软件有限公司“足式机器人的小腿结构和足式机器人”专利获授权。
企查查专利摘要显示,该专利属于足式机器人技术领域,该足式机器人的小腿结构包括:腿部杆、足部和弹性连接机构,所述腿部杆的第一端与所述足部的第一位置可枢转地相连,所述弹性连接机构位于所述腿部杆的侧方,所述弹性连接机构与所述腿部杆的第二端相连,且与所述足部的第二位置相连。
通过在腿部杆的侧方设置弹性连接机构,弹性连接机构与腿部杆相连,且与足部相连,在足式机器人运动的过程中,弹性连接机构可以有效地吸收足部处产生的震动,提高机器人运动的稳定性,并减小震动对机器人造成的冲击,避免震动对机器人造成损坏。
去年8月,小米就曾发布了首款人形机器人“铁大(CyberOne)”,身高177厘米,体重52公斤,是一款全尺寸人形仿生机器人。官方表示,铁大背后的智能、机械能力,全部由小米机器人实验室全栈自研完成,相比之前的机械狗,它的研发难度更高。
官方同时表示铁大具有高情商、可感知人类情绪,视觉敏税、可对真实世界三维虛拟重建,“小脑”发达、可实现双足运动姿态平衡,四肢强健、动力峰值扭矩300Nm等领先能力。

大疆7.5万元电影机Ronin 4D直接满血:支持徕卡、松下等L卡口镜头
DJI Ronin 4D是大疆首款电影摄影机,搭载全画幅禅思X9云台相机,集成了四轴增稳系统、LiDAR 激光跟焦系统、无线图传控制系统等,6K相机版售价46888元起,8K相机版售价74888元。禅思X9云台相机配备可更换卡口设计,不仅支持DJI自主研发的DL卡口,还支持官方推出的徕卡M卡
1799 元,小米米家智能零冷水燃气热水器 16L S1 今日开启众筹
2 月 8 日消息,小米米家智能零冷水燃气热水器 16L S1 将于今日上午 10:00 在小米商城开启众筹,零售价 2299 元,众筹价1799 元。小米表示,米家智能零冷水燃气热水器采用米家自研六重立体降噪技术,同时取得 CCLC 和 CQC 双一级静音认证。此前,小米于 2021 年 12 月推

299元!小米对讲机2S发布:市区5公里通话 100个对讲频道
2月7日消息,今日,小米对讲机2S正式发布,主打轻薄机身、4W功率、120小时超长待机等特性,售价299元。据了解,小米对讲机2S支持4W发射功率,可覆盖10000m²商场或1-5公里市区通话,适用剧本杀、KTV、餐饮、酒店、园区物业、安保等场景。对讲机最多可设置100个对讲频道

索尼发布两款智能中心构图摄像机:支持人工智能分析功能,可自动识别拍摄
2 月 6 日消息,索尼近日正式发布了具有人工智能分析功能的 PTZ(平移 / 俯仰 / 变焦)智能中心构图摄像机新品 SRG-A40 与 SRG-A12,将于2023 年 5 月上市。索尼表示,新品不仅支持人工智能分析,实现自动识别拍摄,智能中心构图,还可自动稳定地跟踪演讲者,无论是侧身还

小米米家智能零冷水燃气热水器 16L S1 将于 2 月 8 日开启众筹,众筹价 1799 元
2 月 6 日消息,据小米商城消息,小米米家智能零冷水燃气热水器 16L S1 将于 2 月 8 日上午 10 点开启众筹,众筹价 1799 元,建议零售价 2299 元。官方称,该热水器采用米家自研六重立体降噪技术,同时取得 CCLC 和 CQC 双一级静音认证。小米于 2021 年 12 月推出了小米

一年卖出超26万台!石头科技G10S成2022全网累计销量第一
如今随着科技设备的普及,扫地机器人成了家庭必备的智能产品之一,能有效减轻生活负担,为用户省不少事。根据奥维云网近日公布的数据,智能清洁电器行业领先品牌石头科技旗下的自清洁扫拖机器人G10S以出色的销量成绩,力压众多清洁电器品牌,拿下2022年国内扫地

华为打造医药行业首个数字机器人平台:效率最高提升25倍
数字机器人是数字化转型的重要组成部分,能够打通资源共享、统一优化业务流程,实现运营与业务深度融合的数字化。2022年,华为数字机器人团队携手国药控股以及华为合作伙伴,规划并建设了国内医药行业首个数字机器人能力中心平台,满足集团上千家分子公司的自动

负离子吹风机到底是不是智商税?一文读懂
近期想买个吹风机,打开电商平台看到的一水的“负离子”或者“水离子”吹风机,都号称能让头发更加顺滑,但是事实真的是这样吗?负离子能中和头发的静电,减轻毛躁吹风机中的负离子发生器可以释放一定的负离子,利用这些负离子可以中和头发中的正电荷,减少

2023 ISE展会,三星展示商用显示可持续发展新时代
近日,三星在巴塞罗那举行的2023年欧洲视听和系统集成展会(ISE)上展示了全新一代商用显示器。在三星新环境战略的指导下,未来商用显示器将采用蕴含三星为维护生态友好所开发出的新一代技术。三星电子视觉显示业务执行副总裁Hoon Chung表示:“我们正致力于确保

我国移动物联网连接数占全球 70%,“物”连接快速超过“人”连接
1 月 30 日消息,从工业和信息化部获悉:我国移动物联网用户规模快速扩大,截至 2022 年底,连接数达 18.45 亿户,比 2021 年底净增 4.47 亿户,占全球总数的 70%。截至 2022 年底,移动通信基站总数达 1083 万个,全年净增 87 万个。我国已经初步形成窄带物联
Bose 家庭娱乐扬声器 550 发布:售价 4999 元,支持 TrueSpace 增强原音技术、杜比全景声内容
1 月 14 日消息,Bose 近期推出了全新 Bose 家庭娱乐扬声器 550,支持杜比全景声内容,并搭载 Bose 特有的 TrueSpace 增强原音技术。全新 Bose 家庭娱乐扬声器 550 能将乐器、对话和音效分离并精确呈现在房间的最左、右侧和正上方,带来更身临其境的音视觉体验。售

绿米 Aqara 发布可视门铃 G4 / 智能门锁 U100:支持 HomeKit 安全视频和 Home Key
1 月 6 日消息,智能家居配件制造商 Aqara 在 CES 2023 上发布了几款新设备,支持苹果钱包中的 HomeKit 安全视频和 Home Key 等功能。视频门铃 G4 兼容 HomeKit 安全视频和本地流媒体串流至亚马逊和谷歌智能显示设备,并将在规范正式准备好用于相机后支持 Matte

飞利浦首次为三星电视带来灯光同步,并推出新的泛光灯灯泡
1 月 5 日消息,飞利浦 Hue 的母公司 Signify 今天宣布,推出一款适用于三星电视的付费飞利浦 Hue Sync TV 应用,拥有三星智能电视的用户将能够把 Hue 灯泡和照明产品连接到他们的电视,灯泡就可以根据屏幕上的内容改变颜色。一般来说,将灯光与媒体内容同步通

LG 新一代 OLED 电视即将发布:G3 系列亮度提升 70%,支持 HDMI 2.1 QMS
1 月 3 日消息,据 FlatpanelsHD 消息,LG 即将发布新一代 OLED 电视,其德国官网现已更新部分参数信息。据介绍,LG G3 采用Brightness Booster Max 技术,全屏亮度将提升 70%,峰值亮度将更高。LG 解释说,这是一种新的“光控架构”,结合了一种新的光增强

12款华为智慧屏喜提版本升级:支持iOS投屏、畅连通话
相较电视领域传统厂商通过版本升级修复问题,华为智慧屏的“常用常新”概念是指通过升级,阶段性带来一项项新的功能、新的场景、新的UI。据华为官方消息,近日,华为智慧屏版本喜提版本更新,带来三项功能升级,号称“鸿蒙超级终端常用常新”。据介绍,此次
